Researchers: Xiaosheng Zhang
Funding Agency: BSAC
Light detection and ranging (LiDAR) technologies have applications that span several industries and markets, from industry metrology, robotic control to autonomous vehicles. Compared to the pulsed time-of-flight method, frequency-modulated continuous-wave (FMCW) LiDAR has been proven effective in providing high-resolution distance and velocity measurements without requiring fast electronics, and is intrinsically immune to interference from ambient light and other LiDAR transmitters.
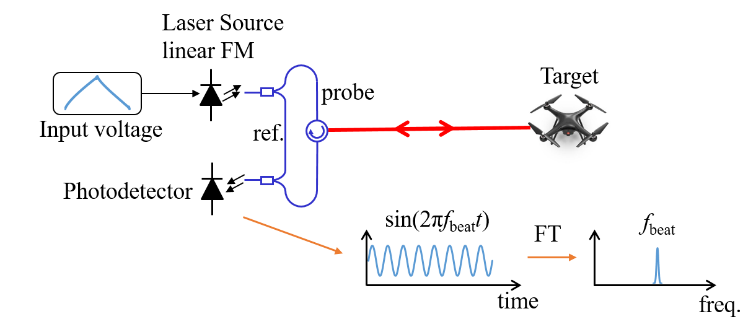
Figure 1: Principle of FMCW LiDAR
Figure 1 shows the principle of FMCW LiDAR. The output of a linearly frequency chirped laser is split into a reference path as the local oscillator, and a probe path towards the target. The interference signal of light in the two paths on a photodetector generates a sinusoidal beat signal whose frequency is proportional to the distance of the target. A Fourier Transform converts this time-domain beat signal into a peak in the frequency domain, thus the target distance can be easily extracted. In addition, if the target is moving, its velocity and distance can be detected simultaneously by utilizing both up-chip and down-chirp of the laser.
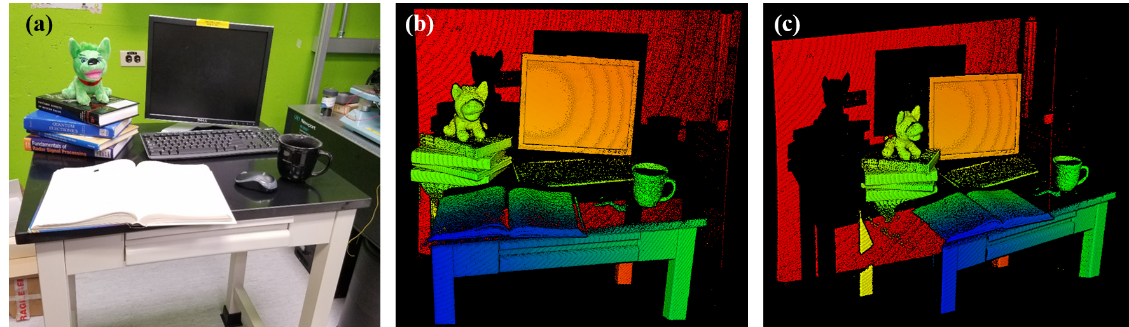
Figure 2: 3D imaging using the FMCW LiDAR. (a) Camera image of the scene. (b), (c) 3D point clouds (same point cloud in two view angles). The color of the points represents depth.
The implementations of FMCW LiDAR typically require expensive lasers with long coherence length and complex control systems to linearize the laser frequency chirps. In this project, we propose an iterative learning pre-distortion method to linearize the laser frequency chirps, and a post-processing algorithm to compensate for the laser phase noise, thus reducing the need for precision control or expensive tunable narrow-linewidth laser hardware. Figure 2 shows an example of 3D imaging results using our FMCW LiDAR system.