Researchers: Phil Sandborn, Sangyoon Han
Collaborators: Behnam Behroozpour, Prof. Boser
Funding Agency: Defense Advanced Research Projects Agency (DARPA)
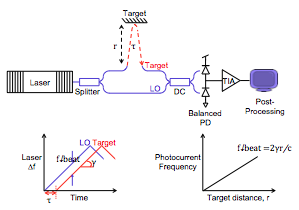
Figure 1: Working principle of Frequency-Modulated Continuous-Wave (FMCW) LIDAR: a linearly tuned laser is launched through an interferometer whose length is defined by the distance to an unknown target. As the frequency sweeps, a beat signal is generated at the photodiode output, whose frequency is proportional to target distance.
Range-finding sensors have applications that span several industries and markets, from metrology to robotic control. In order to penetrate large consumer markets such as 3D imaging for smart-phones or automotive 3D vision, the size and cost of laser detection and ranging (LIDAR) sensors must be reduced by an order of magnitude. By leveraging emerging electronic-photonic integration technology, compact LIDAR sensors with reduction in size/cost can be constructed. We demonstrate the integration of active III-V photonic components, passive Si photonic circuits, and CMOS electronic circuits to create a frequency-modulated continuous-wave laser detection and ranging (FMCW LIDAR) source using this technology. Electronic-photonic 3D integration of optoelectronic components can greatly improve the performance of FMCW LIDAR sources. We also demonstrate that optoelectronic integration improves the bandwidth of optical phase-locked loops (OPLLs).
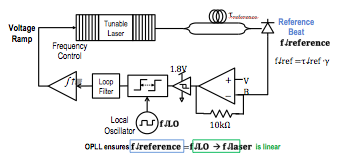
Figure 2: An Optoelectronic Phase Locked Loop (OPLL) is used to linearize the sweep of a tunable laser.
Frequency Modulated Continuous Wave (FMCW) Laser Detection and Ranging (LIDAR) is a powerful technique commonly used for 3D imaging, offering high accuracy and resolution. Figure 1 shows the working principle of FMCW LIDAR. Compared to alternative 3D imaging techniques, such as Time of Flight (TOF) measurements or stereoscopic imaging, FMCW LIDAR offers the advantage of high range resolution at small distances, without the need of high-speed electronics. Integration of optical and electronic components in a single fabrication process to develop a chip-level FMCW LIDAR system has large impact in 3D imaging in mobile applications.
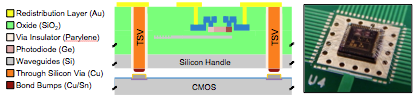
Figure 3: This cartoon cross-section shows our approach to electronic-photonic integration. We use through-silicon vias (TSVs) to electrically connect photonic devices from the top layer to electronic components on the bottom CMOS layer.
FMCW LIDAR requires the use of an optoelectronic phase locked loop (OPLL) in order to linearize the frequency sweep of the tunable laser. Figure 2 shows the block diagram of an OPLL used to achieve this linearization. An interferometer with a fixed reference delay is used as a frequency discriminator. The beat signal generated by the tunable laser and interferometer is compared with a stable local oscillator. Error in phase between the beat and local oscillator is fed back to the laser’s tuning port to create a linear laser frequency sweep.
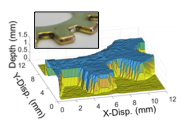
Figure 4: We use our chip-scale OPLL in an FMCW experiment to obtain images such as this 3D image of a gear.
We have developed several integrated photonics components on silicon-on-insulator substrates. These components include efficient grating couplers, low-loss waveguides, splitters/combiners, delay lines, directional couplers, and Ge-photodetectors. Using these integrated components, we designed and fabricated an integrated asymmetric Mach-Zhender interferometer (MZI) with 330ps delay. This device behaves as an optical frequency discriminator, which is a critical component in our optoelectronic feedback scheme for linearizing a tunable laser source. Figure 3 shows the cartoon cross-section of the silicon photonics devices integrated with CMOS electronics to form the backbone of a chip-scale FMCW source.
We use the FMCW OPLL source to generate 3D images with ~10um precision. Figure 4 shows an image of a gear taken at 40cm standoff with ~10um depth resolution.